 |
||||||||||||||||
|
||||||||||||||||
|
|
||||||||||||||||
 |
Visibility - Invisibility | 'More fundamentally, | ||||||||||||||
The inherent ambivalence of visibility, for P.Phelan is summoning surveillance and the law, provoking voyeurism, fetishism, the colonialist/imperial appetite for possessionis. This is partly revealed, when remembered that transperency usualy is presumed to show the real intention of the seen object. It neglects the construction of the visible, that means that only what actually is known can as well be seen. |
||||||||||||||||
|
... conceiving of information as a thing separate from the medium
that instantiates it is a prior imaginary act that constructs a holistic
phenomenon as a matter/information duality' N.Katherine Hayles in 'The Digital Dialectic' |
||||||||||||||||
| With which 'eyes' does technology
see, what issues are laying behind the programming? |
D.Haraway simply and quite positively put it this way: 'The machine is us, our processes, an aspect of our embodiment. We can be responsible for machines; they do not dominate or threaten us. We are responsible for boundaries; we are they.(A Cyborg Manifesto)' chromagan Audiovisual transmissions have to be understood, if they at least can be taken for some reference, more likely as an electronical detection, and therefore a transformation of the surrounding world for the purpose of technological sight. (M.P. Spangenberg) Digital Imagery Exploitation and Production System Thus it has to be distinguished that because of the involvement of electronic machines we but have reached another level of constructing visiblity, though yet technological sight cannot be taken as a given fact of truth. It is a distribution, in which we are deeply entailed. The Distribution of perception ranges in a very wide field from: Imaging Space Public Eye up to Worldwide images for your desktop and probably some more useful purposes: Natural Hazards Some extreme consequences can be seen in military development. Smart Bombs |
|||||||||||||||
 |
So there has to be also attention to what comes out of sight because of a new, or as we believe to think enhanced visibility. Substantially there is already human-machine distribution or interacting-influence, which makes obvious that it is an illusion that information can be separated from materiality. It leads to a dangerous split between information and meaning, ignoring the fact that the development of technology is not proceeding without feedback influences.The way computers work technologically can not really be controlled by humans. Virtually nothing is really to be seen on the basis of code. | |||||||||||||||
| Are you able to encode this? It is a GPS
measuring published by Nasa in cooperation with Southern California
Earthquake Center (SCEC). |
||||||||||||||||
 |
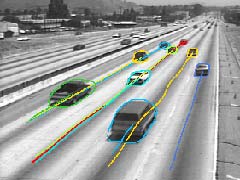
Exactly here
another field is opened up - everything now can be related to everything.This
has been a further important, however provoking human-machinic influence,
as neural networks in particular have been successful in teaching
machines to recognize complex visual phenomena. The important point is that in both these instances programming becomes the experimental production of nonlinear effects of emergence and self-organisation, effects that converge or resonate with fundamental aspects of Deleuze`s philosophy. |
|||||||||||||||
| Measuring space with algorythmic methods has been becoming essential in remodelling architecture. | ||||||||||||||||
 |
J.Johnston
concludes, living today in the vast and multiply networked telecommunications
assemblages functions Deleuze labels virtual have simply been taken
up by less noticeable machines and functions that were formerly attributed
to the brain have been autonomized in machines operating as parts
of highly distributed systems. In short the brain itself has become a deterritorialized organ. Today networking systems as well as humans connected via computers exchange digital data and lead this way obviously to an omni-linearity within the data matrix. Developing from this source and expanding within it the visualization of former invisible objects has been gaining great attention. for more: download thesis. |
|||||||||||||||
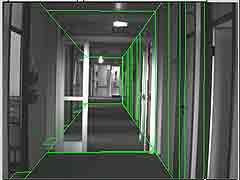
| A robot`s 360
degree view. Controlling Autonomous Robots |
||||||||||||||||
| |
||||||||||||||||
